
නිසි ලෙස නිර්මාණය කරන ලද සම්ප්රේෂක නිෂ්ක්රීය යන්ත්රයක් පටි සම්ප්රේෂකයට ධනාත්මක බලපෑමක් ඇති කරයි.
ඔබේ රේඩියල් ස්ටැකරයේ පටිය පුහුණු කිරීම හෝ ලුහුබැඳීම හෝසම්ප්රේෂක රෝලර් පද්ධතියයනු මධ්යම වශයෙන් හැර වෙනත් ආකාරයකින් ධාවනය වන පටියේ ඕනෑම ප්රවණතාවක් නිවැරදි කරන ආකාරයෙන් අයිඩ්ලර්, පුලි සහ පැටවීමේ තත්වයන් සකස් කිරීමේ ක්රියාවලියකි. සම්ප්රේෂක පටියක් ලුහුබැඳීමේදී මතක තබා ගත යුතු මූලික රීතිය සරලයි, "පළල රෝලයේ/අයිඩ්ලර් එකේ කෙළවර දෙසට ගමන් කරයි, එය මුලින්ම ස්පර්ශ වේ."
පටියක සියලුම කොටස් සම්ප්රේෂක දිගෙන් කොටසක් හරහා ගලා යන විට, හේතුව බොහෝ විට එම ප්රදේශයේ රේඩියල් ස්ටැකර් හෝ සම්ප්රේෂක ව්යුහයන්, නිෂ්ක්රීය යන්ත්ර හෝ පුලි පෙළගැස්වීම හෝ මට්ටම් කිරීම විය හැකිය.
පටියේ එක් කොටසක් හෝ කිහිපයක් මාර්ගය දිගේ සෑම ස්ථානයකින්ම ගැලවී ගියහොත්වාහකය, හේතුව බොහෝ විට පටිය තුළම, ස්ප්ලයිස් තුළ හෝ පටිය පැටවීමේදී විය හැකිය. පටිය මධ්යයෙන් පිටත පටවන විට, බරෙහි ගුරුත්වාකර්ෂණ කේන්ද්රය, ට්රොෆිං අයිඩ්ලර්වල කේන්ද්රය සොයා ගැනීමට නැඹුරු වන අතර එමඟින් පටිය එහි සැහැල්ලුවෙන් පටවන ලද දාරයෙන් ඉවතට ගෙන යයි.
පටි ධාවනයේ ගැටළු හඳුනා ගැනීම සඳහා මූලික නීති මේවාය. මෙම දේවල් වල සංයෝජන සමහර විට හේතුව පැහැදිලිව නොපෙනෙන අවස්ථා ඇති කරයි, නමුත් ප්රමාණවත් පටි විප්ලව සංඛ්යාවක් නිරීක්ෂණය කළහොත්, ධාවන රටාව පැහැදිලි වන අතර හේතුව අනාවරණය වේ. රටාවක් මතු නොවන සාමාන්ය අවස්ථා වන්නේ අක්රමවත් ධාවනයයි, එය හොඳින් නොගැලපෙන බෑම නොකළ පටියක හෝ ඒකාකාරව මධ්යගතව බර නොලැබෙන පටවන ලද පටියක දක්නට ලැබේ.
වාහක පටියක පුහුණුවට බලපාන සාධක
රීල්ස් පුල්ලි සහ ස්නබ්
සාපේක්ෂව කුඩා සුක්කානම් ආචරණයක් සම්ප්රේෂක පුලිවල ඔටුන්නෙන් ලබා ගනී. සම්ප්රේෂක පුලි වෙත ළඟා වන දිගු සහය නොදක්වන පටි පරාසයක් (ආසන්න වශයෙන් පටි පළල මෙන් හතර ගුණයක්) ඇති විට ඔටුන්න වඩාත් ඵලදායී වේ. සම්ප්රේෂක රැගෙන යන පැත්තේ මෙය කළ නොහැකි බැවින්, හිස පුලි ඔටුන්න සාපේක්ෂව අකාර්යක්ෂම වන අතර එය පටිය තුළ නිපදවන ආතතියේ පාර්ශ්වීය අනිසි ව්යාප්තියට වටින්නේ නැත.
වලිග කප්පිවලට ආධාරකයක් නොමැති පටි පරතරයක් ඒවාට ළඟා විය හැකි අතර ඉහළ පටි ආතතියක් ඇති ස්ථානවල හැර ඔටුන්න පැළඳීම උපකාරී විය හැකිය. මෙහි ඇති ලොකුම වාසිය නම්, හොඳ පැටවීම සඳහා අවශ්ය වන පැටවුම් ස්ථානයට යටින් පටිය ගමන් කරන විට ඔටුන්න යම් දුරකට මධ්යගත කිරීමට උපකාරී වීමයි. ස්ථාන මාරු කිරීමේදී රැගෙන යාමේ කරත්තයේ සිදුවන සුළු නොගැලපීමක් වළක්වා ගැනීම සඳහා සමහර විට රැගෙන යාමේ කප්පි ඔටුන්න හිමි වේ.
සියලුම ස්පන්දන පටියේ අපේක්ෂිත මාර්ගයට 90° ක අක්ෂයක් සහිතව සමතලා විය යුතුය. ඒවා එලෙසම තබා ගත යුතු අතර පුහුණු මාධ්යයක් ලෙස මාරු නොකළ යුතුය, වෙනත් පුහුණු ක්රම ප්රමාණවත් නිවැරදි කිරීමක් ලබා දී නොමැති විට, අශෝභන ස්පන්දනවල අක්ෂය මාරු කළ හැකි බව හැර. පටි මාර්ගයට 90° හැර වෙනත් අක්ෂ ඇති පුලි, පටිය වැරදි ලෙස සකස් කරන ලද කප්පි සමඟ මුලින්ම සම්බන්ධ වන පටියේ දාරයේ දිශාවට ගෙන යනු ඇත. ස්පන්දන මට්ටම් නොවන විට, පටිය පහළ පැත්තට ධාවනය වීමට නැඹුරු වේ. පටියක් කප්පියේ "ඉහළ" පැත්තට දිව යන බවට පැරණි "නියම" ප්රකාශයට මෙය පටහැනිය. මෙම දෙකෙහි සංයෝජන සිදු වූ විට, ශක්තිමත් බලපෑමක් ඇති තැනැත්තා පටි ක්රියාකාරිත්වයේ දී පැහැදිලි වනු ඇත.
ට්රොෆින් අයිඩ්ලර් සමඟ පටිය පුහුණු කිරීම ක්රම දෙකකින් සිදු කෙරේ. "knocking idlers" ලෙස පොදුවේ හඳුන්වන පටියේ මාර්ගයට සාපේක්ෂව අයිඩ්ලර් අක්ෂය මාරු කිරීම ඵලදායී වේ, එහිදී මුළු පටියම සම්ප්රේෂකයේ හෝ රේඩියල් ස්ටැකරයේ යම් කොටසක් දිගේ එක් පැත්තකට දිව යයි. පටිය ධාවනය වන අයිඩ්ලර් අවසානයේ (පටි ගමන් දිශාවට) ඉදිරියට "තට්ටු කිරීම" මගින් පටිය කේන්ද්රගත කළ හැකිය. මේ ආකාරයෙන් අයිඩ්ලර් මාරු කිරීම සම්ප්රේෂකයේ හෝ රේඩියල් ස්ටැකරයේ යම් දිගක් පුරා පැතිර යා යුතුය, එය කරදරයේ කලාපයට පෙරය. පටියක් කෙළින්ම ධාවනය කිරීමට හැකි විය හැකි බව හඳුනා ගනු ඇත, අයිඩ්ලර් වලින් අඩක් එක් දිශාවකට සහ අනෙක් පැත්තෙන් අඩක් "තට්ටු" කර ඇත, නමුත් මෙය පටිය සහ අයිඩ්ලර් අතර වැඩි වන රෝලිං ඝර්ෂණයේ වියදමින් සිදුවනු ඇත. මෙම හේතුව නිසා, සියලුම අයිඩ්ලර් මුලින් පටියේ මාර්ගය සමඟ වර්ග කළ යුතු අතර, පුහුණු මාධ්යයක් ලෙස භාවිතා කරන අවම අයිඩ්ලර් මාරු කිරීම පමණි. පටිය අධික ලෙස නිවැරදි කර ඇත්නම්, අයිඩ්ලර් මාරු කිරීමෙන්, අමතර අයිඩ්ලර් අනෙක් දිශාවට මාරු කිරීමෙන් නොව, එම අයිඩ්ලර්ම ආපසු ගෙනයාමෙන් එය යථා තත්ත්වයට පත් කළ යුතුය.
පැහැදිලිවම, එවැනි අක්රිය මාරු කිරීම පටි ගමනේ එක් දිශාවකට පමණක් ඵලදායී වේ. පටිය ආපසු හරවා ඇත්නම්, එක් දිශාවකට නිවැරදි කරන මාරු කරන ලද අක්රියකාරකයක් අනෙක් දිශාවට වැරදි ලෙස යොමු කරනු ඇත. එබැවින් ප්රතිලෝම පටිවල සියලුම අක්රියකාරක වර්ග කර ඒ ආකාරයෙන් තැබිය යුතුය. අවශ්ය ඕනෑම නිවැරදි කිරීමක් ප්රතිලෝම ක්රියාකාරිත්වය සඳහා නිර්මාණය කර ඇති ස්වයං-අක්රියකාරක සමඟ සැපයිය හැකිය. සියලුම ස්වයං-අයෝග්යකාරක මෙම වර්ගයේ නොවේ, මන්ද සමහරක් එක් දිශාවකට පමණක් ක්රියා කරයි.
පටි ගමන් දිශාවට ට්රොෆින් අයිඩ්ලර් ඉදිරියට (2° ට වඩා වැඩි නොවේ) ඇලවීම ස්වයං-පෙළගැස්වීමේ බලපෑමක් ඇති කරයි. අයිඩ්ලර් ස්ටෑන්ඩ් එකේ පසුපස කකුල ෂිම් කිරීමෙන් අයිඩ්ලර් මේ ආකාරයෙන් ඇලවිය හැකිය. මෙහිදී නැවතත්, පටි ආපසු හැරවිය හැකි විට මෙම ක්රමය සතුටුදායක නොවේ.
මෙම ක්රමය "knocking idlers" වලට වඩා වාසියක් ඇත, මන්ද එය idler එකේ දෙපැත්තට පටිය චලනය කිරීම නිවැරදි කරන බැවින්, එය අක්රමවත් පටි පුහුණු කිරීම සඳහා ප්රයෝජනවත් වේ. troughing රෝල් මත වැඩි ඝර්ෂණය හේතුවෙන් වේගවත් පුලි ආවරණ ඇඳීම දිරිමත් කිරීමේ අවාසිය එයට ඇත. එබැවින් එය හැකි තරම් අරපිරිමැස්මෙන් භාවිතා කළ යුතුය - විශේෂයෙන් ඉහළ කෝණය troughing idlers මත.
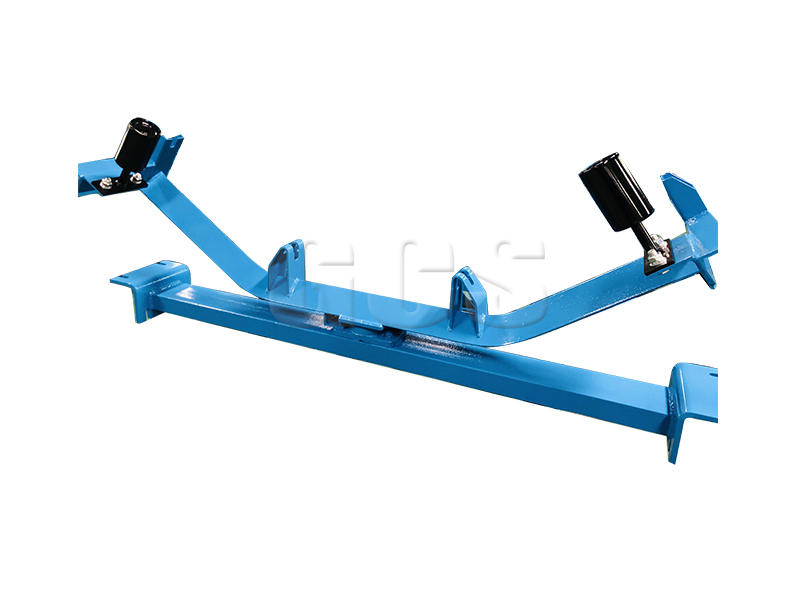
පටිය පුහුණු කිරීම සඳහා සහාය වීම සඳහා දකුණු පස ඇති එක වැනි විශේෂ, ස්වයං-පෙළගැස්වීමේ ට්රොෆින් අයිඩ්ලර් තිබේ.
රිටර්න් අයිඩ්ලර්, පැතලි වීම නිසා, ඇලවූ ට්රොෆින් අයිඩ්ලර් වලදී මෙන් ස්වයං-පෙළගැස්වීමේ බලපෑමක් ලබා නොදේ. කෙසේ වෙතත්, පටියේ මාර්ගයට සාපේක්ෂව ඒවායේ අක්ෂය (තට්ටු කිරීම) මාරු කිරීමෙන්, රිටර්න් රෝලය එක් දිශාවකට නියත නිවැරදි කිරීමේ බලපෑමක් ලබා දීමට භාවිතා කළ හැකිය. ට්රොෆින් රෝල් වලදී මෙන්, පටිය මාරු වන රෝලයේ අවසානය නිවැරදි කිරීම ලබා දීම සඳහා ආපසු පටි ගමන් දිශාවට කල්පවත්නා ලෙස ගෙන යා යුතුය.
ස්වයං-පෙළගස්වන ආපසු රෝල් ද භාවිතා කළ යුතුය. මේවා මධ්යම පින් එකක් වටා භ්රමණය වේ. මෙම පින් එක වටා රෝලය භ්රමණය වීම මධ්යයෙන් පිටත පටියකින් සිදුවන අතර ස්වයං-නිවැරදි කිරීමේ ක්රියාවකදී පටියේ මාර්ගයට සාපේක්ෂව අයිඩ්ලර් රෝල් අක්ෂය මාරු වේ. සමහර ආපසු අයිඩ්ලර් සෑදී ඇත්තේ 10° සිට 20° V-අගලක් සාදන රෝල් දෙකකින් වන අතර එය ආපසු ධාවනය පුහුණු කිරීමට උපකාරී වේ.
පටිය වලිග කප්පියට ළඟා වන විට එය මධ්යගත කිරීම සඳහා තවත් ආධාරයක් ලෙස, වලිග කප්පියට ආසන්නව ඇති ආපසු රෝල්වල විකල්ප කෙළවර තරමක් ඉදිරියට ගෙන ගොස් එසවීම සිදු කළ හැකිය.
පුහුණු රෝල් වල ඵලදායීතාවය සහතික කිරීම
සාමාන්යයෙන්, ස්වයං-පෙළගැස්වීමේ අයිඩ්ලර් මත අමතර පීඩනයක් අවශ්ය වේ.
සහ, සමහර අවස්ථාවලදී, ශක්තිමත් පුහුණු බලපෑමක් අවශ්ය වන සම්මත අයිඩ්ලර් මත. මෙය සාක්ෂාත් කර ගැනීමට එක් ක්රමයක් නම්, එවැනි අයිඩ්ලර් යාබද අයිඩ්ලර් රේඛාවට ඉහළින් ඔසවා තැබීමයි. ආපසු පැත්තේ උත්තල (හම්ප්) වක්රවල අයිඩ්ලර් හෝ නැමීමේ පුලි පටි ආතතියේ සංරචක හේතුවෙන් අමතර පීඩනයක් ඇති අතර එම නිසා ඵලදායී පුහුණු ස්ථාන වේ. පැති ස්වයං-පෙළගැස්වීම් රැගෙන යාම උත්තල වක්රයක් මත ස්ථානගත නොකළ යුතුය, මන්ද ඒවායේ උස් ස්ථාන මළකඳේ අයිඩ්ලර් සන්ධි අසාර්ථකත්වය ප්රවර්ධනය කළ හැකිය.
පටි කෙළින් ධාවනය කිරීම සඳහා මෙම වර්ගයේ මාර්ගෝපදේශ භාවිතා කිරීම නිර්දේශ නොකරයි. ඒවා මුලින් පටිය පුහුණු කිරීමට සහාය වීමට සහය වීමට භාවිතා කළ හැකිය, එමඟින් එය කප්පිවලින් ඉවතට පැන යාම සහ සම්ප්රේෂක පද්ධතියේ ව්යුහයට හානි වීම වැළැක්වීමට උපකාරී වේ. හදිසි පියවරක් ලෙස පටියට සමාන ආරක්ෂාවක් ලබා දීමට ද ඒවා භාවිතා කළ හැකිය, එය සාමාන්යයෙන් ක්රියාත්මක වන විට පටි දාරය ස්පර්ශ නොකරන්නේ නම්. ඒවා පටිය මත අඛණ්ඩව දරා සිටියහොත්, රෝල් කිරීමට නිදහසේ සිටියද, ඒවා පටි දාරයෙන් ගෙවී ගොස් අවසානයේ දාරය දිගේ ප්ලයි වෙන්වීමට හේතු වේ. පටිය ඇත්ත වශයෙන්ම කප්පියේ ඇති පසු පටි දාරයට එරෙහිව දරා ගැනීමට පැති මාර්ගෝපදේශ රෝලර් ස්ථානගත නොකළ යුතුය. මෙම අවස්ථාවේදී, කිසිදු දාර පීඩනයකට පටිය පාර්ශ්වීයව චලනය කළ නොහැක.
පටියම
පළලට සාපේක්ෂව අධික පාර්ශ්වීය තද බවක් ඇති පටියක්, රැගෙන යන අයිඩ්ලර් එකේ මැද රෝලය සමඟ සම්බන්ධතාවක් නොමැතිකම නිසා පුහුණු කිරීම වඩාත් අපහසු වනු ඇත. මෙම කරුණ හඳුනා ගැනීමෙන් පරිශීලකයාට අමතර පූර්වාරක්ෂාවන් ගැනීමට සහ අවශ්ය නම්, එහි සුක්කානම් හැකියාව වැඩි දියුණු කිරීම සඳහා පුහුණුව අතරතුර පටිය පැටවීමට හැකි වේ. අගල හැකියාවන් සැලසුම් සීමාවන් නිරීක්ෂණය කිරීම සාමාන්යයෙන් මෙම කරදර වළක්වා ගනු ඇත.
තාවකාලික පාර්ශ්වීය ආතතියේ විෂමතා ව්යාප්තිය හේතුවෙන් සමහර නව පටි එක් පැත්තකට, යම් කොටසකට හෝ ඒවායේ දිගෙන් කොටස් වලට ගැලවී යාමට නැඹුරු විය හැකිය. ආතතිය යටතේ පටිය ක්රියාත්මක කිරීම ප්රායෝගිකව සෑම අවස්ථාවකම මෙම තත්ත්වය නිවැරදි කරයි. ස්වයං-පෙළගැස්වීමේ අයිඩ්ලර් භාවිතා කිරීම නිවැරදි කිරීම සිදු කිරීමට උපකාරී වේ.
අදාළ නිෂ්පාදනය


පළ කිරීමේ කාලය: සැප්-15-2022